
I’m a numbers guy. Being able to quantify something is very satisfying, because then it means I can assess it more or less objectively and try to improve it if needed. And I know I’m not the first person who does astrophotography to wonder how well my mount is performing. PHD2, a very popular software package for guiding during astrophotography, provides a very useful tool for exactly that: the Guiding Assistant.
I’ll bet that practically everyone who uses PHD2 for guiding has used the Guiding Assistant. At a minimum, it will make recommendations for tweaking the settings for its guiding algorithms, but it can also tell you quite a bit about your polar alignment accuracy, how your mount is performing, and general seeing conditions. A ton of stuff has already been written about how to improve your guiding, and I’m not going to try to add to that here in this post. What I want to cover instead is how to get other information from the Guiding Assistant that you can use to improve your mount and setup.
Everyone who uses PHD2 is familiar with the graph of guiding performance. I haven’t done a screen shot of one of my own, but here’s an example from the internet:

The numbers that most people pay attention to are under RMS Error. These numbers show the RMS (root-mean-square or standard deviation) of the motions on each axis, using the data that’s visible in the window. You can view these numbers either as camera pixels or as absolute arc seconds (provided you have correctly specified the focal length of your guiding setup and the pixel size of your camera). The smaller the RMS error numbers, the better. Generally speaking, a total RMS error of less than one arc second is acceptable for decent guiding.
Please note that the RMS error during guiding should not be interpreted as indicative of the performance of your mount. It’s quite possible to have a great mount but poor guiding performance if you haven’t set up PHD2 guiding parameters properly. I know that from experience.
The first advice people get when they ask for help improving poor guiding is “run the Guiding Assistant.” The Guiding Assistant in this case will recommend certain settings that you can then choose to implement in hopes of getting better guiding performance. Here’s a Guiding Assistant screen shot from one of my recent imaging sessions:
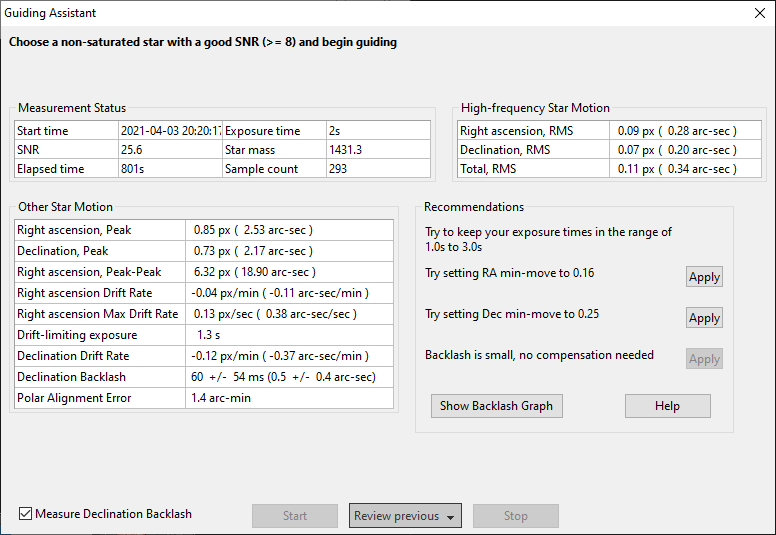
The instructions for the Guiding Assistant say to let it run for at least a couple minutes, until the numbers for Total RMS and Polar Alignment Error have stabilized. PHD2 turns off guiding corrections while the Guiding Assistant is running, so you get to see how well your mount tracks in the absence of any corrections. When you hit the Stop button, the Guiding Assistant can also measure declination backlash (how much “play” there is in the declination tracking when direction is reversed). Once complete, the Guiding Assistant suggests changing some settings for improved tracking. Often, taking those recommendations will improve tracking performance.
During this particular run of the Guiding Assistant, I wanted to explore the performance of my iOptron GEM45 mount a bit. iOptron says that the mount can track with an accuracy of plus or minus 7 arc seconds, or 14 arc seconds peak-to-peak. They even included a graph of their bench test with the mount to confirm it:
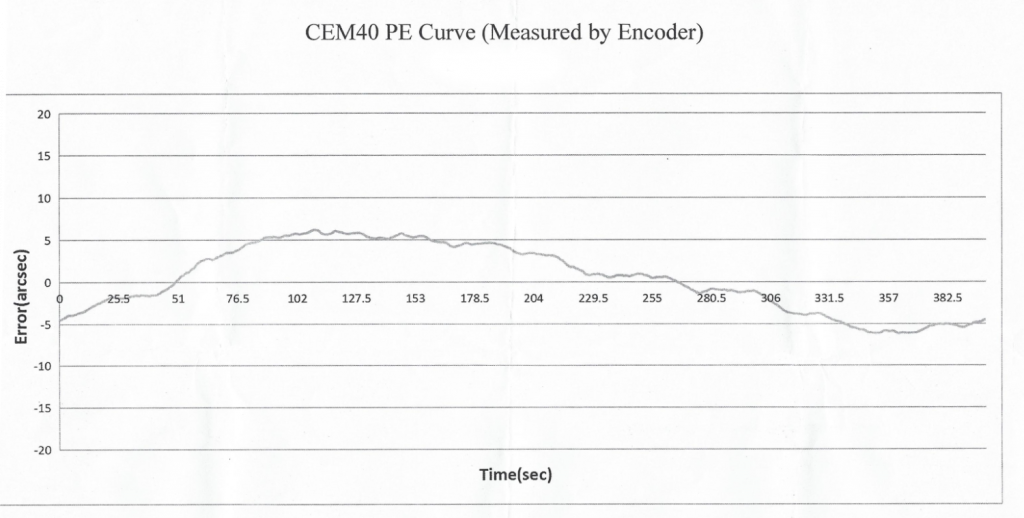
Now, keep in mind that this test was conducted on a test bench, probably with a high-resolution encoder. There was no load on the mount, either. So this really represents an absolute best-case scenario. In actual use, there are a number of things that can add to the overall error in mount tracking, such as the load on the mount, any other manufacturing imperfections, the quality of the polar alignment, etc. Nevertheless, the Guiding Assistant will report the peak-to-peak star motion in RA that it records while it runs, so that might be useful. So I allowed the Guiding Assistant to run for two full periods (400 sec each) of the RA worm gear in order to compare its findings with the reported periodic error in my mount. Here’s what it came up with (I extracted this data from the PHD2 guiding logs and plotted it in Excel):
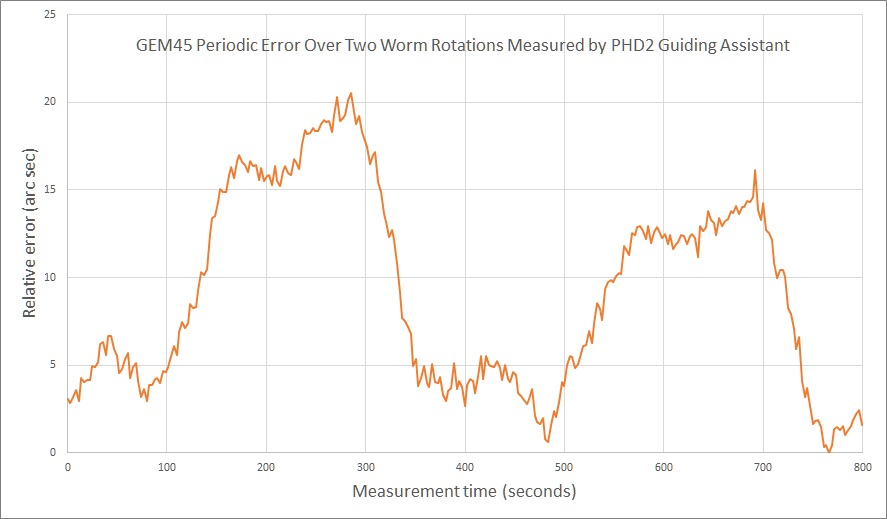
The peak-to-peak star motion in RA recorded by the Guiding Assistant appears to be just a shade over 20 arc seconds. You can clearly see the pattern in the period error repeating twice over the two periods of the worm gear. However, the fact that the two peaks are about 4 arc seconds different on the vertical axis indicates to me that there must be some drift in the star over that time that’s attributable to something other than periodic error in RA. So I think that this graph actually overestimates the periodic error a bit. I suppose you could do a little hand waving and come up with a better estimate for periodic error from this graph, but I’m content with drawing the conclusion that the result from the Guiding Assistant indicates that I’m generally getting the performance from the mount that iOptron says I should be getting.
Other outputs from the Guiding Assistant are also helpful. First, it estimates the error in polar alignment–1.4 arc min in the example above, which seems pretty decent (I use the built-in iPolar camera and iOptron’s iPolar software for polar alignment). Second, my declination backlash is somewhere between zero and one arc second, which the Guiding Assistant tells me is small enough that no compensation is needed. Finally, the High-Frequency Star Motionn section is an indicator of the seeing conditions. I don’t really have a feel for whether the numbers above are good or bad, but you can compare them from night to night to see how they change. PHD2 is not able to correct for these high-frequency motions (and attempting to do so is commonly called “chasing the seeing” and leads to frustration and disappointment).
So, while the Guiding Assistant can help you fine-tune your guiding through its recommendations, it can also give you hints about how well your equipment is otherwise performing, and where improvements (outside of PHD2) may be needed.
Some other thoughts about PHD2:
- If you haven’t done so already, get a copy of the PHD2 Log Viewer. You can examine and analyze your guiding from a previous imaging session to your heart’s content. The PHD2 log itself isn’t difficult to read, either (although it’s a bit laborious). I extracted the data for the graph above by hand and very quickly imported it into Excel.
- Keep in mind that the RMS errors reported by PHD2 in the guiding graph are based on all the data that’s currently displayed in the graph. If the graph includes the significant deviations that typically result from dithering, the RMS errors are going to increase. Knowing that will keep you from wondering with dismay why your RMS error just jumped from 0.5″ to 1.5″.
- Similarly, the PHD2 Log Viewer shows those numbers for all the data it has in the graph. You can exclude all the data and then select only a portion for analysis in order to exclude events like dithering. It can make a big difference in the RMS error numbers.
- These days, everyone is touting the improvements in guiding brought about by the recent addition of multi-star guiding to PHD2. I didn’t see a huge improvement myself, but I wouldn’t discourage anyone from using it.
- I recently switched the RA guiding algorithm to Predictive PEC and saw some improvement from that. While my GEM45 mount can record and play back periodic error correction, it seems that the prevailing opinion is that you cannot play back PEC in the mount and use PHD2 for guiding at the same time (caveat: I’ve never tried it myself). So having PHD2 do the same thing in software seems like a good approach.