

Modern astro imaging involves a lot of moving parts, and controlling those parts can be a daunting task for new imagers. For example, imaging a deep sky object involves taking multiple long exposures of the object with a camera that is being made to very precisely track the object while it is being imaged. Generally, the camera uses a telescope as its lens, and the telescope is mounted on an equatorial mount that is motorized and/or computerized so that it tracks the motion of the object very precisely as it moves across the sky from east to west. Thankfully, there are software packages available that will manage much of this complexity for you.
The most popular packages (based on my own observations, anyway) are Astrophotography Tool (APT), Sequence Generator Pro (SGP), SharpCap, Backyard EOS/Nikon, and N.I.N.A (Nighttime Imaging ‘n Astronomy). And these are just the packages that run in Windows. If you prefer the Linux environment, there are options there, too (but you’ll have to research them yourself–I’m not very familiar with the Linux choices).
Why I Chose N.I.N.A
There are good reasons to choose any of these packages to help you with your own imaging. I’m not going to go through the pros and cons of each of these packages here–I haven’t even tried them all–but rather I’m just going to say that I’ve chosen N.I.N.A for my own use. In particular, the purpose of this article is to talk specifically about using N.I.N.A with my iOptron GEM45 mount, and even more specifically about how to set things up so that N.I.N.A can command the mount to do a meridian flip if needed.
What does N.I.N.A do for me? It handles a lot of things:
- Helps me choose an imaging target and frame it properly
- Allows me to define an imaging sequence (“take 20 images of 5 minutes each”) and then executes it automatically
- Slews the telescope to the target and centers the target in the field of view
- Focuses the telescope automatically (by controlling the focus motor and camera)
- Manages the auto-guiding software to fine-tune the tracking
- Changes filters as needed
- And a bunch of other things
I can set up an imaging session in N.I.N.A and then tell N.I.N.A to execute it, and the whole business will run on autopilot for several hours. It’s pretty cool.
N.I.N.A is documented fairly well, and I think you can probably figure out how to get it set up and running by consulting the documentation as well as a bunch of available Youtube videos. I like the videos put out by Cuiv, the Lazy Geek.
ASCOM and iOptron Commander
Throughout the process, N.I.N.A communicates with the telescope mount and other hardware using a software interface called ASCOM. ASCOM defines and implements a standard common interface that allows software packages like N.I.N.A to talk to different types of hardware (like mounts, focusers, and cameras) without having to know anything about the hardware itself. Instead, each telescope mount (or focuser, camera, etc.) provides an ASCOM driver that takes care of the dirty work of translating N.I.N.A’s instructions into something the hardware understands. It’s kind of like how Windows uses standard device drivers to handle communication with all the different types of devices that might be attached to a PC.
In my case, I have ASCOM drivers for my GEM45 mount, for my cameras, and for my focus motor. iOptron provides a software package called iOptron Commander for my GEM45 mount. Commander is both an application and a driver, in that I can use it by itself to control the mount, or N.I.N.A can talk to it (using ASCOM) to control the mount itself.
So when I set up N.I.N.A to interface with my telescope mount, N.I.N.A gets a list of available hardware from ASCOM, and I tell it which hardware to choose from that list. That connects N.I.N.A to my telescope mount through the iOptron Commander software.
(It’s worth mentioning at this point that ASCOM has come into widespread use within the astronomy community, and almost all modern astronomy software that interfaces with hardware can make use of ASCOM to do so. If you have a different type of mount than me, you can probably find an ASCOM driver for it. In that case, your procedure for configuring meridian flips will be different, but some of the same principles still apply.)
So why did I go into such gory detail just to talk about meridian flips? In order to get the meridian flip to work correctly, I need to adjust (or at least confirm) some settings in both N.I.N.A and Commander.
What’s a Meridian Flip?
A meridian flip is a maneuver that’s specific to a German equatorial mount (GEM) design. The meridian flip needs to occur when the object that the telescope is tracking crosses the meridian and moves from the eastern half of the sky to the western half. What happens is that both axes of the telescope mount rotate by 180 degrees. This is done to keep the telescope from swinging down under the mount and potentially running into the tripod legs or pier. This video is a good demonstration of the concept:
Bottom line: if you’re imaging an object that will cross the meridian during your imaging run, you’ll need to pause imaging when the meridian is crossed, do the meridian flip, and then continue imaging. N.I.N.A can do that for you automatically if you configure it (and Commander) correctly.
Configuring Commander for Meridian Flips
There are actually a couple different ways to accomplish a meridian flip with N.I.N.A and Commander. You can either (a) have N.I.N.A initiate the flip, or you can (b) allow Commander to take care of it. We’re going to choose option (a) for the simple reason that N.I.N.A will choose to do the meridian flip *in between* exposures. If we allow Commander to do the flip, that flip may occur *during* a N.I.N.A exposure, which is something we’d rather avoid. So let’s start by setting up Commander properly.
iOptron Commander will launch automatically when you connect to your iOptron telescope mount in N.I.N.A. Here’s what you’ll see when Commander first launches.
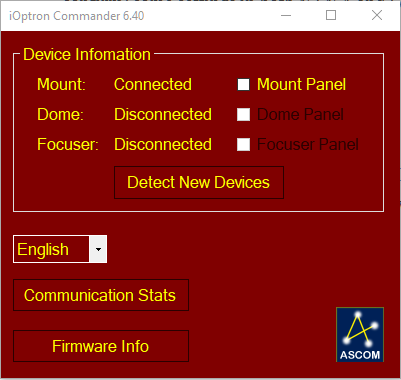
Click on where it says “Mount Panel” to open a new view that allows you to see and modify the status of your iOptron mount.

Here in the Mount Panel you can see where the mount is pointing. You can also command it to slew, sync, move to its zero position, start or stop tracking, or move it manually. You can also see and set things like the date, time, and latitude and longitude where the mount is located. It’s important that all of these settings be correct, of course, because the mount will use the date, time, and mount location to compute things like azimuth, altitude, and local sidereal time, which in turn will allow it to know when the target it’s tracking will cross the meridian. But in particular, we need to tell Commander how to behave when the target does cross the meridian. To do that, we click “Mount Settings” to access those settings that affect the meridian-crossing behavior.
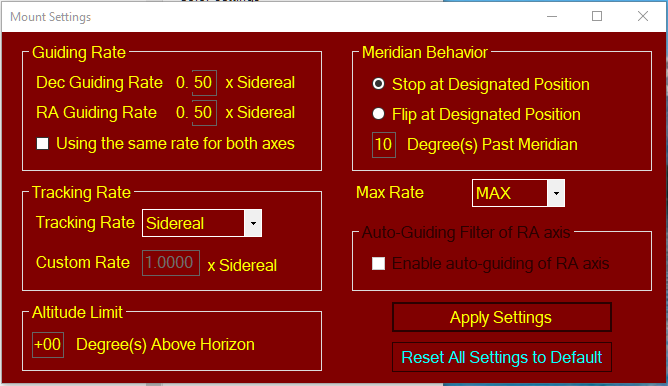
Specifically, we want to modify the settings within the “Meridian Behavior” section of the mount settings view. We want to tell the mount that it can track past the meridian by a certain amount (10 degrees is a safe choice, as shown above), and to simply stop tracking once it reaches that limit. So make those settings in the view and then click the “Apply Settings” button to save them.
Here, the “Degrees Past Meridian” setting is actually referring to degrees of right ascension, not azimuth. Since the Earth rotates at a rate of 15 degrees per hour, each degree of rotation in right ascension consumes four minutes of time. So if we allow the mount to continue tracking an additional ten degrees past the meridian in right ascension, the mount will not stop tracking until 40 minutes after the meridian is crossed. We’re going to set up N.I.N.A so that it will initiate the meridian flip before that 40 minutes has elapsed.
It’s worth noting that my own experimentation with these settings seems to indicate that any meridian flip commanded by N.I.N.A will fail of the “Degrees Past Meridian” value is zero, so be sure to set it to a nonzero value. I think 10 degrees is a good safe value to use.
NOTE: the latest (as of this writing) version of the GEM45 mount firmware, v20210105, has a bug in it that involves the ‘Degrees Past Meridian” setting. This post addresses it and provides a workaround.
Configuring N.I.N.A for Meridian Flips
Now that we’ve configured the mount so that it will track a target considerably past the meridian, we need to tell N.I.N.A how to do the meridian flip. You can find the Auto Meridian Flip settings in N.I.N.A by going to the Options tab (along the left side of the N.I.N.A window) and then choosing Imaging from the tabs at the top of the window. On the right side of that tab are the Auto Meridian Flip settings:
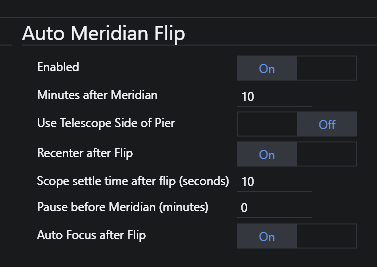
These settings are documented on N.I.N.A’s documentation pages. They’re fairly simple. In order for N.I.N.A to do the meridian flip, you need to set “Enabled” to On. Next, “Minutes after Meridian” determines when N.I.N.A will do the meridian flip, relative to the time at which the target will cross the meridian. Most recommendations I’ve seen are to let the target cross the meridian before doing the flip, but I don’t think that’s a hard requirement. The important thing is to make sure that the number of minutes you enter for “Minutes after Meridian” is less than the number of minutes that the mount will track past the meridian as determined by the mount’s “Degrees Past Meridian” setting discussed above (remembering that each degree past the meridian is four minutes of time tracking). If I set “Degrees Past Meridian” to 10, that gives me 40 minutes of tracking past the meridian. A value of 10 minutes for N.I.N.A’s “Minutes After Meridian” setting will give you a large and comfortable margin of safety.
The “Use Telescope Side of Pier” setting tells N.I.N.A whether it should check with the mount to see if the telescope is already on the east side of the pier (meaning a meridian flip is not needed) before performing the flip. I’ve left this setting to Off because it doesn’t seem to be needed, but I don’t think there would be any harm in turning it On.
If you’ve implemented plate solving in N.I.N.A (and if you haven’t, you should), turn on the “Recenter after Flip” setting to have N.I.N.A make sure your target is properly centered as desired after the flip. This will cause N.I.N.A to take an image after the flip, plate solve the image, and adjust the mount position if necessary to ensure your telescope is precisely centered on the target coordinates.
The “Scope settle time after flip” setting is the number of seconds that N.I.N.A should pause after the mount is slewed, so that any residual vibrations from the movement have stopped. I’d give it at least 10 seconds, maybe more if your mount has a large load on it. I don’t really see a use for the “Pause before Meridian” setting and I leave that set to zero, but you can change it if you come up with a reason.
Finally “Auto Focus after Flip” tells N.I.N.A whether you want it to do an auto focus once the flip is complete. Auto Focus in N.I.N.A requires that you have a suitable motorized focuser attached to your mount and connected to N.I.N.A. I have a Pegasus Astro Focus Cube 2 on my scope, and N.I.N.A’s ability to automatically focus for me has been a huge asset to my imaging. I highly recommend it. But leave this setting off if you don’t have a suitable focus motor attached.
How N.I.N.A Flips
It’s good to know exactly what N.I.N.A does when it comes to performing a meridian flip. First, it will only perform the flip during an imaging run (where the target is being tracked and images are being taken). For the current target, before starting the next exposure N.I.N.A looks at the amount of time until the target reaches the meridian, adds to that the “minutes after meridian” setting value in N.I.N.A’s options, and determines whether there is enough time to complete the exposure before the meridian flip is supposed to be performed. Let’s say, for example, you’re doing 5-minute exposures, and your “minutes after meridian” setting is 2 minutes. If your exposure would begin with less than three minutes before the target reaches the meridian, then there would not be enough time to complete the exposure before the meridian flip is supposed to be performed two minutes past the meridian. In this case, N.I.N.A would not start the exposure but would instead wait until after it performs the flip. Furthermore, NINA stops the mount from tracking when it makes that determination. When the specified number of minutes has elapsed, N.I.N.A will command the mount to do the flip, and then will wait the specified time for the mount to settle down. After that, plate solving and autofocusing will occur if they are enabled, and then the imaging run will resume.
The ability for N.I.N.A to do the meridian flip for you automatically during an imaging session means that there is one less thing for you to worry about while images are being taken. I routinely set up imaging of a target, kick it off, and then go to bed while images are still being taken. Having N.I.N.A take care of all the details means I don’t have to stay up all night to babysit the equipment and software.